When collision-avoidance navigation system developer Orca AI embarked on a project with NYK Group to set up a remote-controlled voyage demonstration in Japan, it could not have known how demanding the project would become.
Orca co-founder and chief technology officer Dor Raviv conceded that NYK was taking a risk in 2020 by appointing a then small Israeli technology firm, but the shipping group and its research arm, Monohakobi Technology Institute (MTI), had been impressed by what they had seen on a Ray Car Carriers vessel.

Ray was an early investor in Orca as it looked to improve after the 2019 capsizing of the 7,700-ceu Golden Ray (built 2017) was caused by human error.
But when the Covid pandemic struck, there was no way Orca could go to Japan, so development work had to be done remotely, in translation, over different time zones to integrate the hardware, software and algorithms with existing equipment on the 1,800-dwt cargo ship Suzaku (built 2019).
“It was extremely challenging for us,” Raviv said. “They [MTI] were extremely demanding.”
NYK and Jun Nakamura, MTI manager of its autonomous ship team in its maritime & logistics technology group, said the company had collaborated with Ray and was looking to target greater navigational safety for its fleets as part of a project leading towards the Meguri 2040 fully autonomous ship project administrated by the Nippon Foundation.
The first step was building a collision-avoidance system. It was a major undertaking.
Raviv was getting up at 3am in Tel Aviv, feeding his newborn baby with a bottle while watching on his laptop the first sea trials happening half a world away on as a small experimental vessel pitched and rolled.
He admits the first attempts did not go quite to plan. Orca tried three distance estimation algorithms before finding a fourth version that worked, and numerous questions were raised.
“What happens if the radar sees a target, but the camera does not? What happens if the camera sees a buoy, but the AIS doesn’t?” Raviv asked.
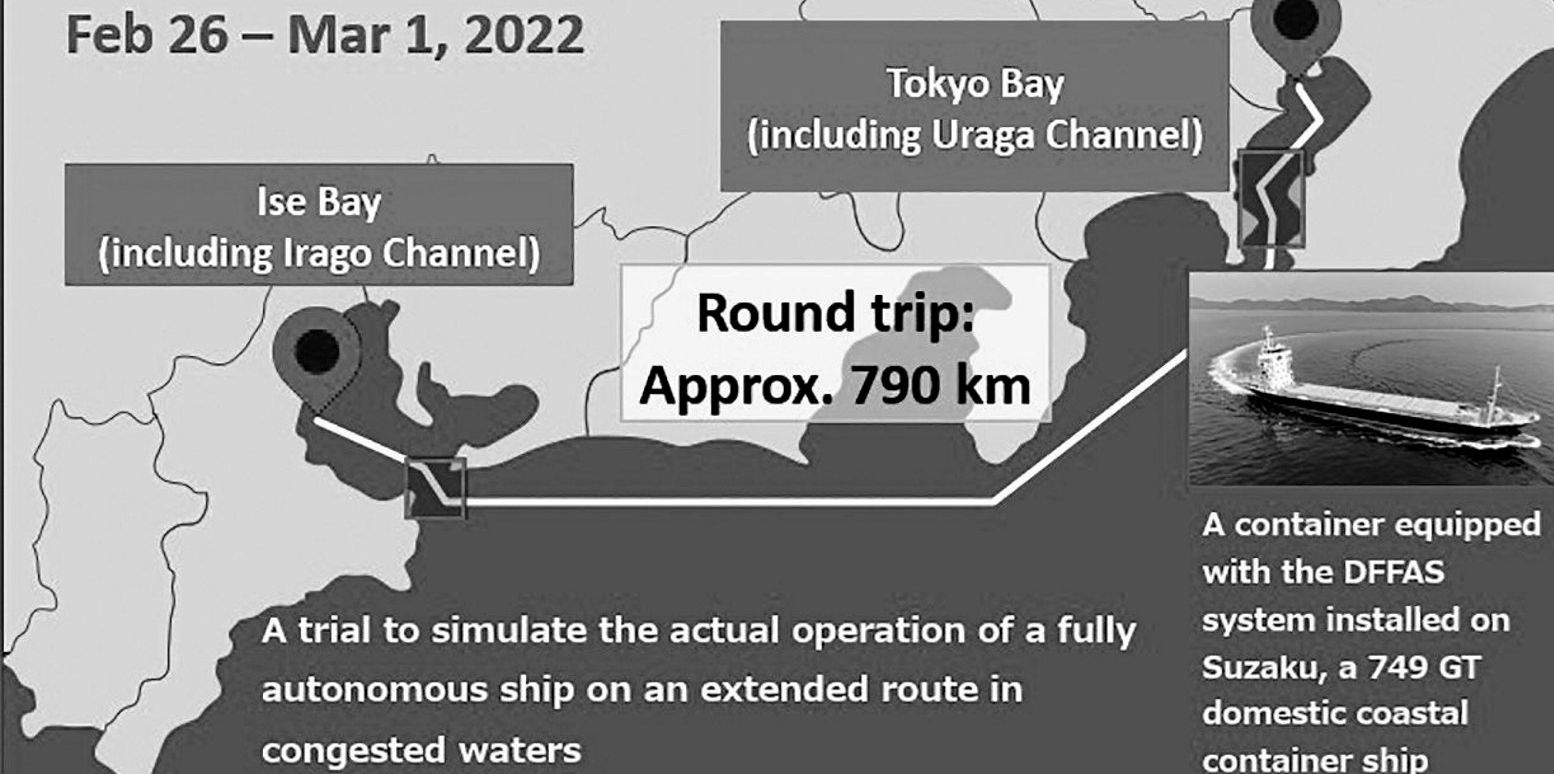
Nevertheless, a strict timetable was kept and in February 2022 the Suzaku undertook a 790-km (490-mile) autonomous remotely controlled journey through Tokyo Bay.
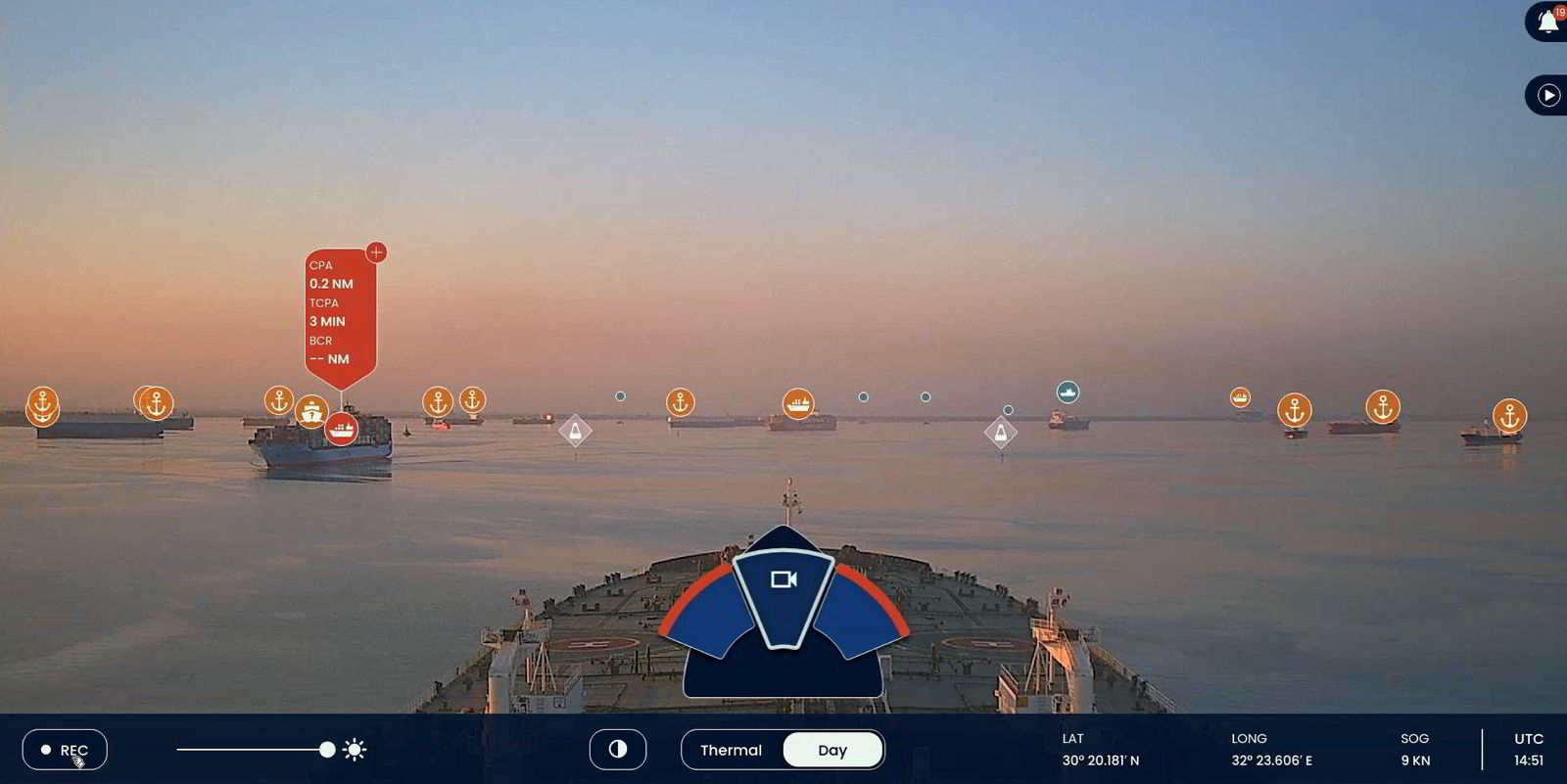
The ship was operated from a control centre in Tokyo without any crew on board. It made a 40-hour journey through the congested waterway using 18 cameras to provide a 360-degree view for detecting, tracking and classifying other vessels to make 107 collision-avoidance manoeuvres.
Thermal imaging cameras pick up distant targets, while AI identifies what they are, their range and closest point of approach to prioritise avoidance if needed.
But this was not just a one-time demonstration project.
The aim is to develop a commercially viable navigational-aids system that improves on what humans can see and respond to when watchkeeping: that will increase safety and cut costs, allowing a single person to control a ship from the bridge.
The two companies continue to work together to advance machine learning and artificial intelligence for navigational systems to find out where it works, and what to do when it does not.
As long as it takes
Navigational hazards can be incredibly subjective to assess, even for humans, let alone machines, but the company aims to develop its systems and test them out over whatever time it takes, one or two years, to get the proof they work.
Nakamura said NYK sees major scope in freeing up time for crews to rest or undertake other tasks if fewer people are needed on the bridge to monitor navigation.
But proof that systems are safe still needs a lot of evaluation by shipping companies, technology developers and regulators.
“The worst-case scenario is that new technology leads to a collision,” Raviv said.
It is one reason why Orca is focused solely on developing better automated navigational systems rather than an overarching autonomous voyage set-up.
Orca’s kit is now on 600 ships and it aims to keep growing, Ravi said, but it will not expand into other digital areas, because it has enough work on its hands building and integrating collision-avoidance systems.